
ONE LAB. THREE WAYS TO START.
Choose the Track That Matches Your Goal
Every track is built around the same Industrial ROS2 Manipulation Lab.
Start free to run the workcell, choose the Simulation Track to understand and adapt the complete application, or follow the Full Track to deploy the same architecture on real hardware.




Not Sure Where to Begin?
Start with the Free Starter Lab.
You can verify the environment, run the workcell, and experience the product before deciding whether to continue with the Simulation or Full Track.
MORE THAN AN ONLINE COURSE
The Product Is the Lab.
The Lessons Show You How to Use It.

Most ROS2 learning paths teach individual tools through disconnected examples.
The Industrial ROS2 Manipulation Lab gives you a complete application that already runs.
Industrial ROS2 Manipulation Lab
The complete development environment containing the Docker infrastructure, simulated workcell, ROS2 packages, robot models, MoveIt2 configuration, perception pipeline, task logic, scripts, configuration files, deployment resources, and documentation.
industrial_bt_framework
The reusable, robot-agnostic ROS2 application runtime inside the Lab.
It coordinates perception, manipulation actions, Behavior Trees, execution feedback, retries, fallbacks, and recovery logic while keeping application behaviour separate from robot-specific implementation.
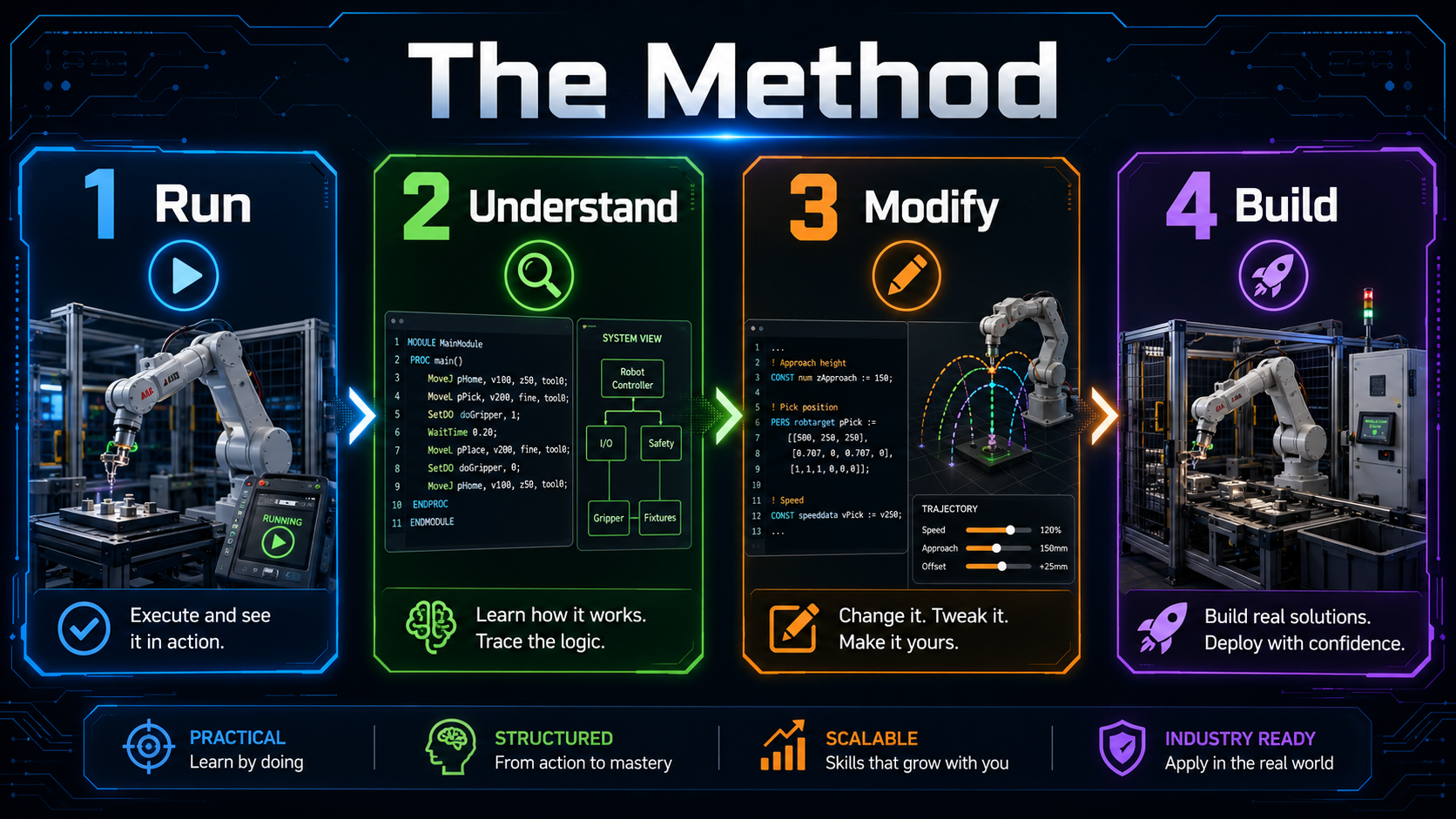
THE LEARNING METHOD
Run. Understand. Modify. Deploy.
You do not begin with an empty workspace or a collection of disconnected exercises.
You begin with a complete working application and progressively turn it into a system you understand, can modify, and can adapt to your own robotics projects.
Choose How Far You Want to Go
Whether you are starting from zero or aiming to build advanced industrial applications, there is a clear next step for you.
Free Starter Lab
Run the complete environment and experience the working system.
Simulation Track
Run → Understand → Modify
Full Track
Run → Understand → Modify → Deploy
Every track builds on the same Lab architecture.
You are not changing learning paths. You are progressively unlocking deeper levels of the same complete robotics system.
FREQUENTLY ASKED QUESTIONS
Choose Your Starting Point with Confidence
Do I need a real robot to start?
No.
The Free Starter Lab and the complete Simulation Track run without physical robotics hardware.
A compatible robot and supporting hardware are required only to validate the real-hardware deployment path included in the Full Track.
Do I need to install ROS2 on my computer?
Not for the Free Starter Lab or Simulation Track.
They run inside a Docker-based ROS2 Humble environment. Windows 11 with WSL2 and Ubuntu 22.04 are supported.
For real-hardware deployment in the Full Track, Ubuntu 22.04 with ROS2 Humble installed locally is the recommended reference environment.
What prior experience do I need?
You do not need to be an advanced ROS2 developer.
You should understand the basic purpose of ROS or ROS2, be comfortable following terminal commands, and be willing to read and modify basic source code.
Which track should I choose?
Choose the Free Starter Lab to test the environment and run the workcell.
Choose the Simulation Track to understand and adapt the complete application without requiring real hardware.
Choose the Full Track to follow the entire engineering path from simulation to real robot deployment.
Can I upgrade later?
Yes.
Simulation Track students receive private upgrade instructions inside their course when they are ready to continue to real-hardware deployment.
